In this project I compare several methods of control for the canonical cartpole system including LQR, energy shaping, MPC, and RL.
Comparing Methods of Control for the Cartpole
Controls
Matlab
Machine Learning
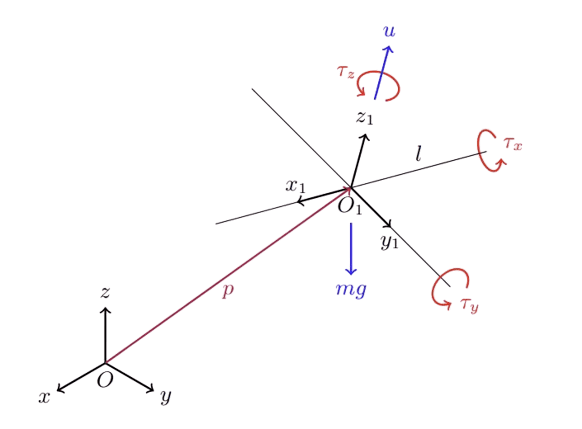
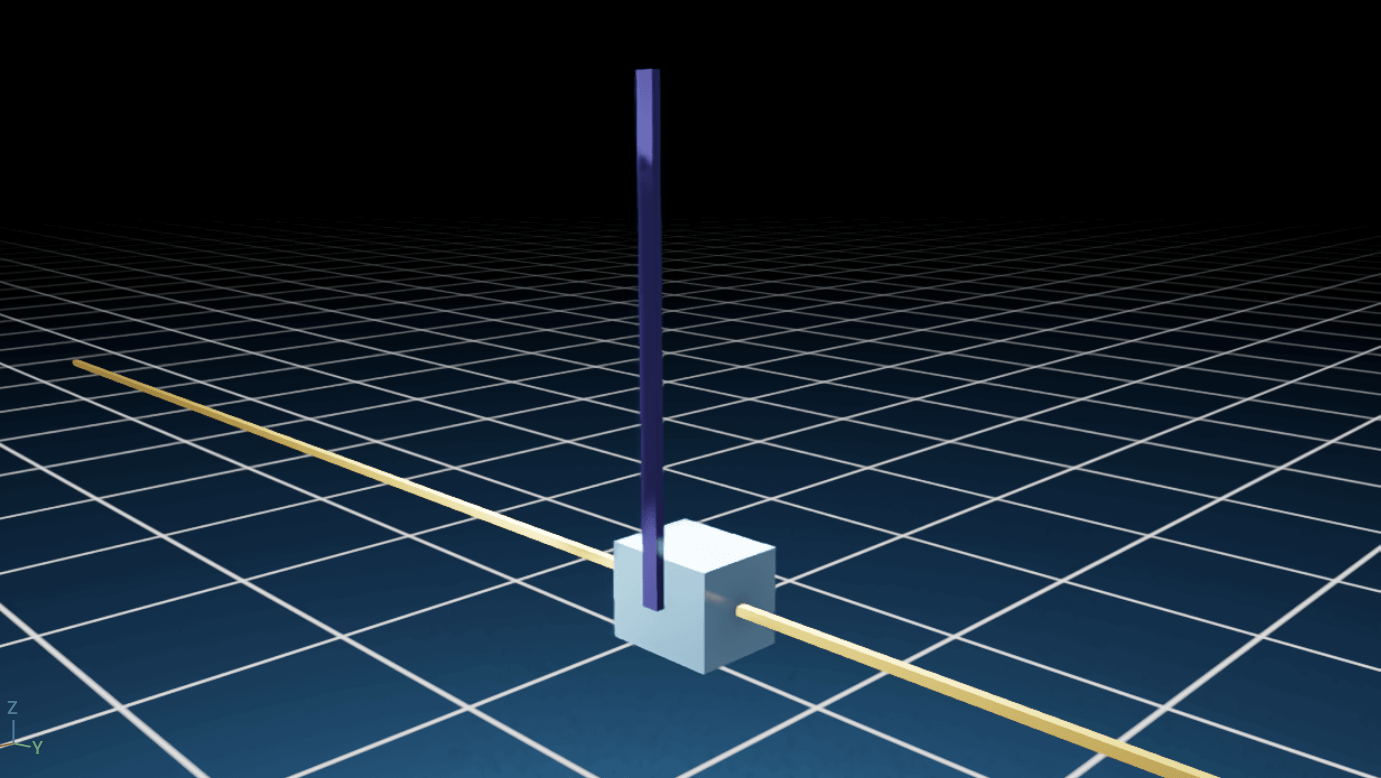
Control of a Quadrotor
Final project of CDS233 nonlinear controls. Development of control algorithms for a planar and full 3D qaudrotor. Starting with feedback linearzation and control Lyapunov functions. Then we implement control saftey functions and backup control barrier function. Finally we demonstrate MPC on both the planar and full 3D quadrotor.
Matlab
Controls
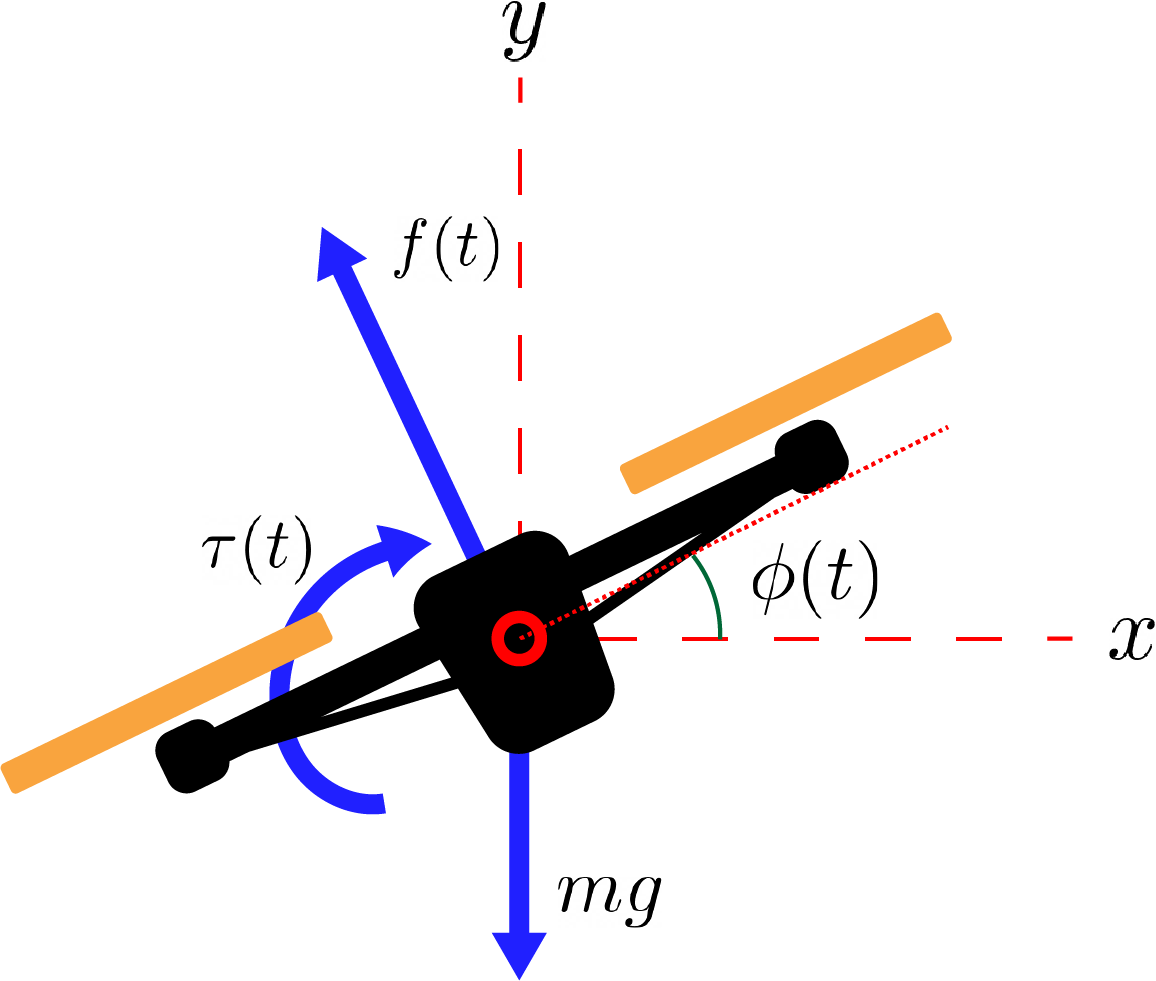
Dynamics of Planar Quadrotor
Final project of CDS232 nonlinear dynamics. Analysis of stability of the planar quadrotor system including Liptschitz continuity, Picard iteration, bounds on perturbation, equilibrium points, radius of attraction and safety
Matlab
Controls

Safe Drone Flight with Time-Varying Backup Controllers
Research conducted in the AMBER lab at Caltech during winter quarter. Extension to research completed over the summer on backup controllers for high speed geofencing. Extends previous work to support multiple agents with multiple backup maneuvers
Matlab
Controls
Quadrotors
Safety Critical Control

NASA Big Idea Challenge 2022
The Caltech AIAA team we received a $140,000 grant for our cable based lunar transportation method. I worked on the autonomy and planning aspects of the project.
Planning
Solidworks
Python

SURF 2021 Research. Safety Guarantees for High Speed Drone Flight
Conducted a summer undergraduate research fellowship (SURF) at Caltech for the summer of 2021. Worked closely with Prof Aaron Ames and graduate student Drew Singletary. At the conclusion of the project we wrote a paper which has been submitted to IEEE RA-L journal.
C++
Drones
Research
Safety