
Hi! I’m a 3rd year PhD student at Stanford University, co-advised by Prof. Monroe Kennedy and Prof. Mac Schwager. I’m a member of the ARM Lab and the Multi-Robot Systems Lab. I’m funded by the National Science Foundation Graduate Research Fellowship and the Stanford Graduate Fellowship.
I want to build everyday home robots. Centered on theory, learning, and innovative hardware solutions, my research aims to enhance robot performance on challenging tasks. Currently I am interested in leveraging tactile sensing to enable dexterous manipulation and making vision language action (VLA) models more generalizable.
🔬 December 2025: My dexterous strawberry manipulation robot was featured in Scientific American! See link here.
🍓 August 2025: Please check out my new paper DexFruit !!
🍑 May 2025: I’ll be attending ICRA 2025 in Atlanta, Georgia! Excited to present Safer-Splat and Next Best Sense.
🇩🇪 November 2024: I’ll be attending CoRL to present our recent work Splat-Mover.
* denotes equal contribution.
DexFruit: Dexterous Manipulation and Gaussian Splatting Inspection of Fruit
Under Review, 2025.
[paper] [project page] [code] [video]
TensorTouch: Calibration of Tactile Sensors for High Resolution Stress Tensor and Deformation for Dexterous Manipulation
Under Review, 2025.
[paper] [project page] [code]
Splat-Nav: Safe Real-Time Robot Navigation in Gaussian Splatting Maps
IEEE Transactions on Robotics, 2025.
[paper] [project page] [code]
SAFER-Splat: Safety with Control Barrier Functions in Online Gaussian Splatting Maps
Arxiv, 2024.
[paper] [project page] [code]
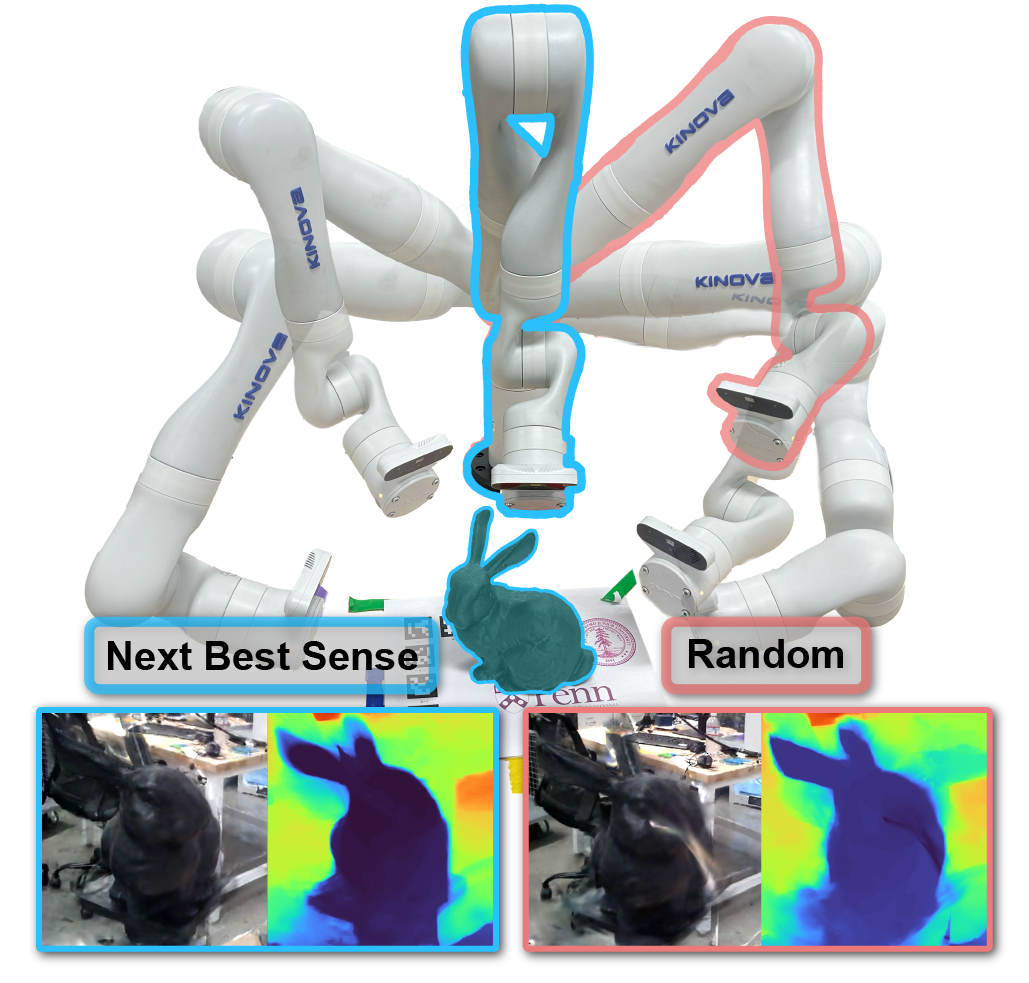
Next Best Sense: Guiding Vision and Touch with FisherRF for 3D Gaussian Splatting
Arxiv, 2024.
[paper] [project page] [code] [video]
Splat-MOVER: Multi-Stage, Open-Vocabulary Robotic Manipulation via Editable Gaussian Splatting
Conference on Robot Learning (CoRL), 2024.
[paper] [project page] [code]
Touch-GS: Visual-Tactile Supervised 3D Gaussian Splatting
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
[paper] [project page] [code] [video]
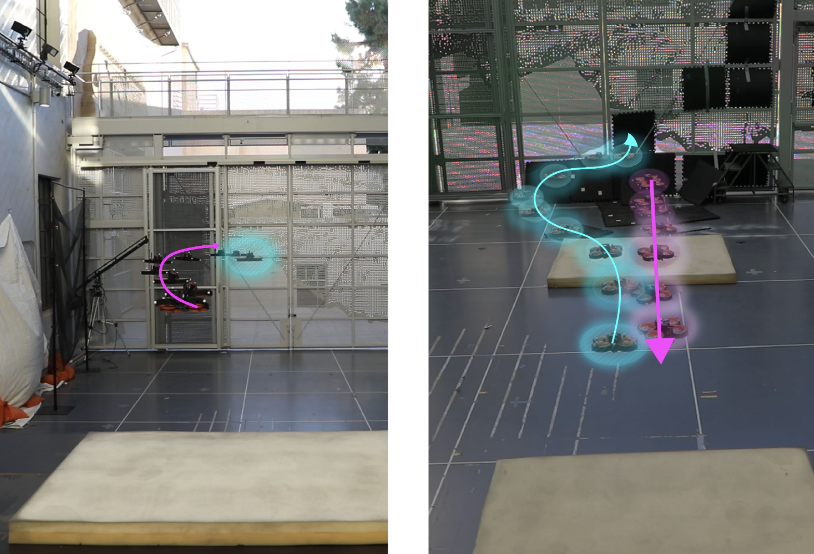
Safe Drone Flight with Time-varying Backup Controllers
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022.
[paper]
Interactive Mandelbrot Set Visualization
An interactive web application that allows users to explore the beautiful and complex world of the Mandelbrot Set.
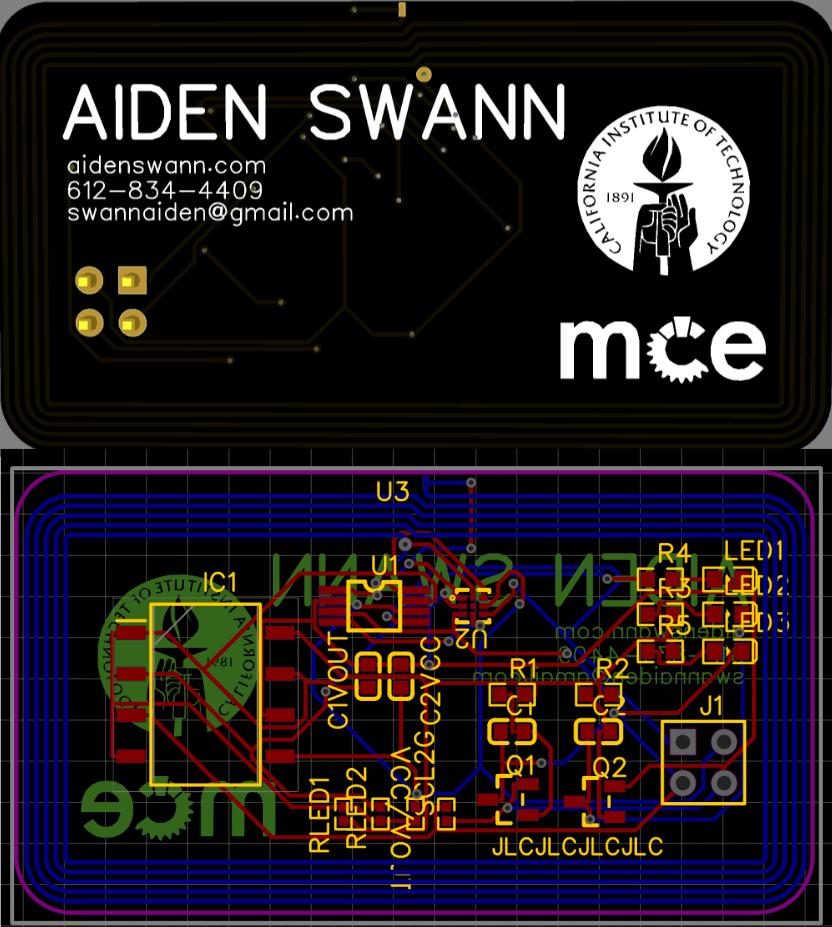
Making a PCB Business Card
I create a RFID scannable PCB business card. Schematics are attached so you can make your own!
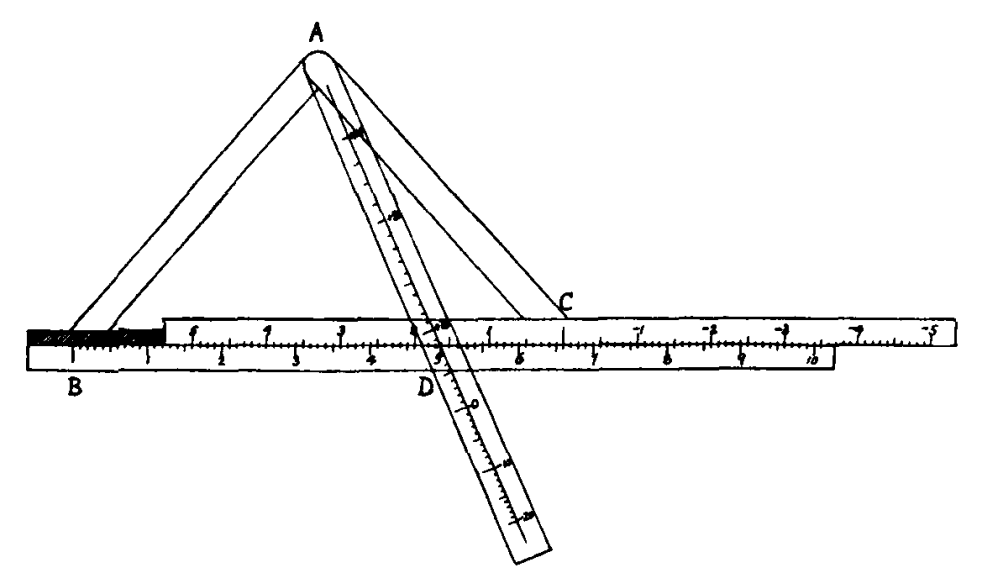
A Mechanical Solution to the Quadratic Equation
I create a mechanical slide rule which can geometrically solve the quadratic equation. This is part of a greater push of mine to use physics to solve math. Nature is an incredible calculator that solves NP hard problems in nanoseconds.
Comparing Methods of Control for the Cartpole
In this project I compare several methods of control for the canonical cartpole system including LQR, energy shaping, MPC, and RL.
Introduction to Web Development
I learned basic javascript through an introductory class at Caltech. Here are some of the projects I completed.

Euler Project Submissions
Project Euler is a compilation of mathematical challenge problems that are intended to be solved using a combination of mathematical elimination and computational brute force.
Physics Simulations in Blender
An important part of scientific communication is creating compelling and aesthetically pleasing visualizations. The goal of this project is to introduce me to blender, which is a professional animating software which I hope to use to create scientific animations. I started my learning process by creating several animation using builtin physics simulations.

Wankel Rotary Engine
Machined a model Wankel rotary engine as my project in Caltech's CNC machining class ME23. In this class I learned the essentials of CNC machining on Mills and Lathes. We used a Trak CNC mills and Lathes and well as Haas CNC machines. I did all aspects of programming and setup to make each of the parts.
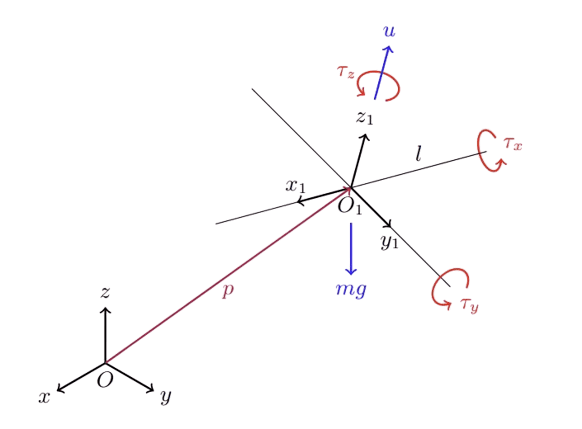
Control of a Quadrotor
Final project of CDS233 nonlinear controls. Development of control algorithms for a planar and full 3D qaudrotor. Starting with feedback linearzation and control Lyapunov functions. Then we implement control saftey functions and backup control barrier function. Finally we demonstrate MPC on both the planar and full 3D quadrotor.
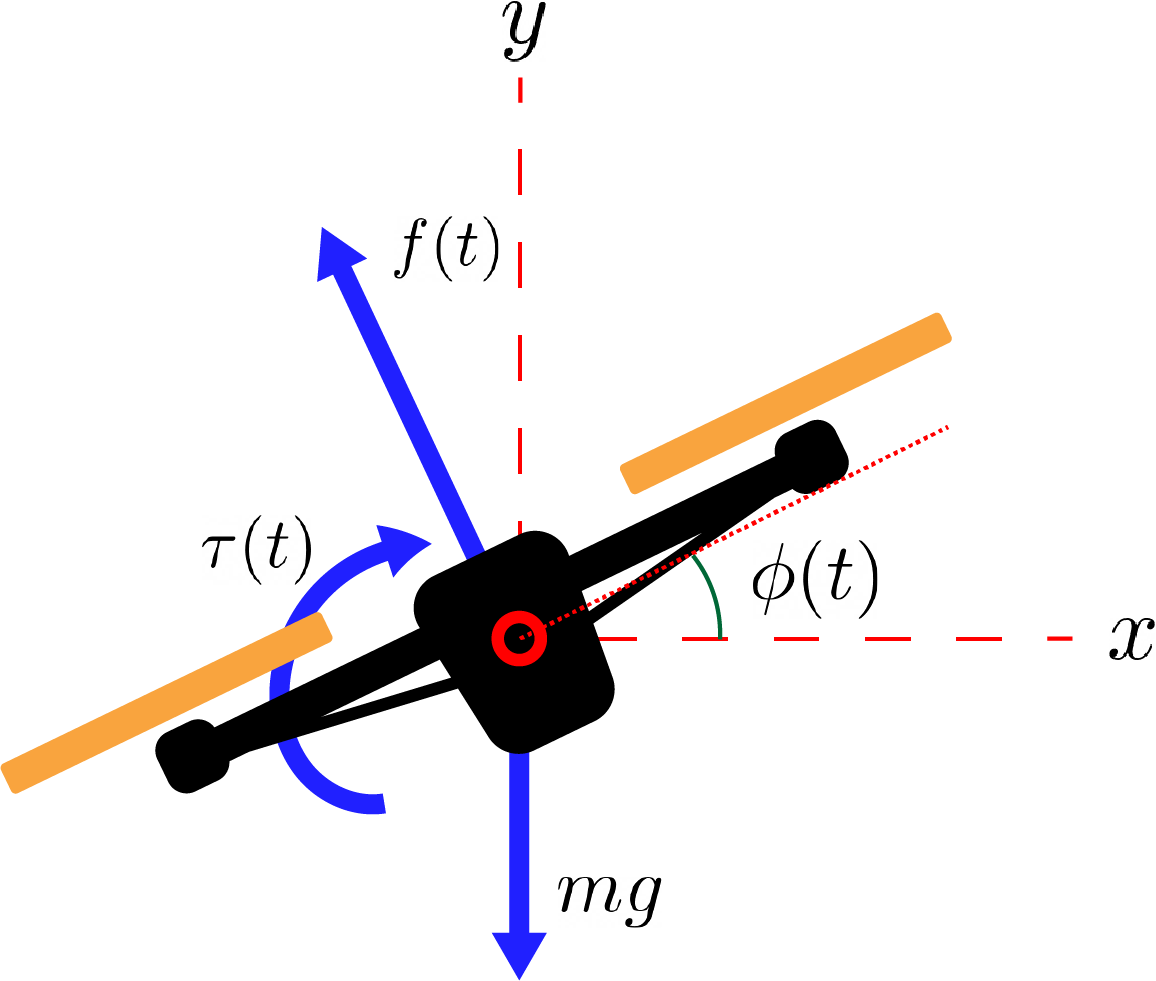
Dynamics of Planar Quadrotor
Final project of CDS232 nonlinear dynamics. Analysis of stability of the planar quadrotor system including Liptschitz continuity, Picard iteration, bounds on perturbation, equilibrium points, radius of attraction and safety

Safe Drone Flight with Time-Varying Backup Controllers
Research conducted in the AMBER lab at Caltech during winter quarter. Extension to research completed over the summer on backup controllers for high speed geofencing. Extends previous work to support multiple agents with multiple backup maneuvers

NASA Big Idea Challenge 2022
The Caltech AIAA team we received a $140,000 grant for our cable based lunar transportation method. I worked on the autonomy and planning aspects of the project.

ME72 Design Competition
Me72 is a two term rigorous team-based engineering design and fabrication challenge. Teams have 6 months to to design, assemble, and evaluate the fidelity and mechanical reliability of their robots. This years challenge is sumo robotics

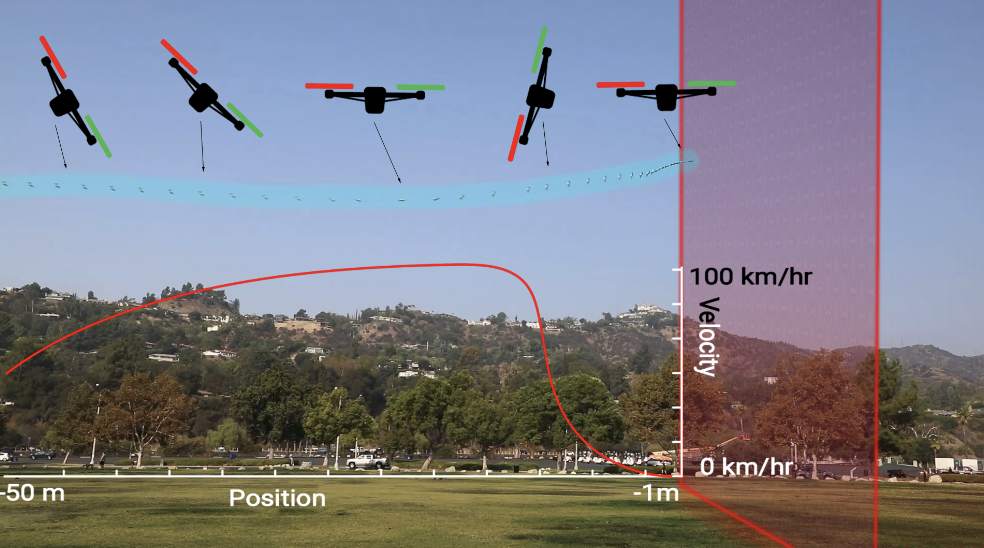
SURF 2021 Research. Safety Guarantees for High Speed Drone Flight
Conducted a summer undergraduate research fellowship (SURF) at Caltech for the summer of 2021. Worked closely with Prof Aaron Ames and graduate student Drew Singletary. At the conclusion of the project we wrote a paper which has been submitted to IEEE RA-L journal.

Generative ML
Used generative machine learning to investigate new ways of picturing the cosmos. State of the art pretrained models are primed with extraterrestrial keywords which combined multiple aspects of the human relationship with space.

Transmission Design Contest (1st Place)
My group designed an innovative shifting transmission, which won first place in the Caltech ME14 competition.
Octagon Design Project
Caltech ME14 Octagon design project. A two week design based robotics competition. No designs are constructed.
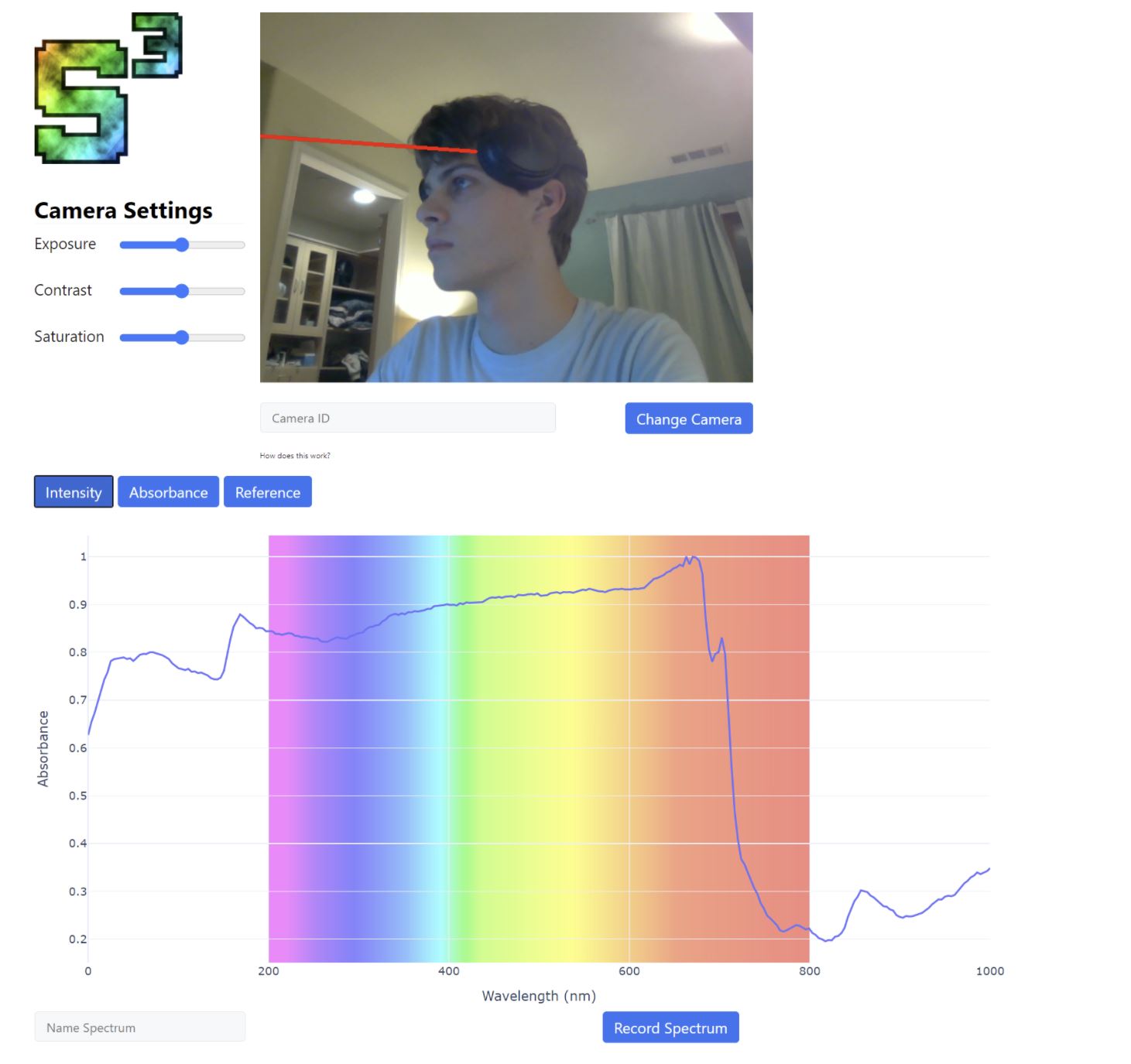
S^3 Spectrometer
Commissioned to design a webcam spectrometer software for chemistry lab due to pandemic at home conditions
Hobbies
Outside of research, I enjoy rock climbing, photography, camping and wood working.
Old Projects
Some of my old projects can be found (here)